



摘要: 摘 要: 最早的交通信号控制系统起源于美国俄亥俄州克利夫兰市,为满足城市道路容纳更多的车辆、满足更多出行的需求,信号控制系统朝着更深度的信息化和智能化方向发展。在20世纪90年代,智能交通系统的概念逐渐成型。作为智能交通系统的重要组成部分——车联网起步较晚,对...
摘 要:
最早的交通信号控制系统起源于美国俄亥俄州克利夫兰市,为满足城市道路容纳更多的车辆、满足更多出行的需求,信号控制系统朝着更深度的信息化和智能化方向发展。在20世纪90年代,智能交通系统的概念逐渐成型。作为智能交通系统的重要组成部分——车联网起步较晚,对车联网的研究需要和智能交通系统应用的开发同步推进,以满足行车过程中对各类技术细节的要求。
关键词:智能交通系统 车联网

1 红绿灯起步的交通管理
从汽车诞生的那一天起,对于城市交通而言,安全和便捷始终是最重要的课题。面对城市道路中日益增长的车辆,以及与日剧增的事故风险和通行压力,城市管理者和交通领域的科研人员利用交通信号设施来实现交通控制,并不断推陈出新。
19 世纪60 年代,英国伦敦议会大厦前的十字路口安装了世界上第一盏交通信号灯(壁板式燃气交通信号灯)。它由一位警察牵动皮带进行灯色切换:红灯停,绿灯行。虽然缓解了路口的交通压力,但这第一盏交通信号灯在工作了23 天后就爆炸自灭了。
1914 年,美国俄亥俄州克利夫兰市(Cleveland,Ohio)开始部署电气交通信号灯用于地面交通控制和协调,这被认为是最早的交通信号控制系统。1918 年,纽约市五号街的一座高塔上出现了三色(红、黄、绿三种标志)交通信号灯,这种经典的“配色”一直延续到现在。
1926 年,英国的沃尔佛汉普顿首次使用自动化控制器来控制信号灯:按照一个固定的周期切换信号灯的颜色。
20 世纪60 年代,美国丹佛市通过模拟计算机对交通信号实现集中化的实时控制,可以同时对道路网中各交叉路口的交通信号进行协调控制。而后,加拿大的多伦多在全市范围内建成了第一个全市交通信号集中控制与协调系统。
至今,交通信号灯的样子几乎没有什么改变,但交通控制的理论方法和运行系统却一直在进步。从人工操作或固定周期式的单点控制,到协同相邻道口周期、保证道路沿线的绿灯具有连续性的干线控制,再到持续优化整个区域交通资源(主要是信号灯的配时)的面控制。如今的交通控制技术虽然演进出很强的自动化、智能化特性,但同时也达到了性能瓶颈。
采用单一的“红绿信号灯”模式进行交通控制已无法更有效地管理交通资源(实时性不足):红绿灯只在路口起效,其效用无法覆盖整条道路;驾驶员可能因为天气原因或在交通拥堵情况下看不清交通信号灯;司机容易陷入“黄灯进退两难的境地”(Yellow Interval Dilemma),即在黄灯闪烁时难以抉择是“进”还是“停”;虽然在交通网络中引进了诱导系统(提示路况信息),司机也可以使用实时反馈路况的导航系统,但对道路利用的整体提升效果并不明显……
城市道路要容纳更多的车辆、满足更多的出行需求,就需要突破原有的技术领域,朝着更深度的信息化和智能化方向发展。

2 智能交通(ITS)
“智能交通”的想法早在 20 世纪初就已经出现,它的诞生与城市化发展休戚相关:城市管理者希望它能够解决城市道路日益拥堵的状况,以及所造成的经济损失。在 20 世纪90年代,智能交通系统(Intelligent Transportation System,ITS)的概念逐渐成型。
目前,ITS 已经在许多发达国家获得了广泛应用,其研究推进工作呈现“三足鼎立(领先)”的局面:美国、欧洲、日本(美国智能运输协会 -ITS America、欧洲道路运输通信技术实用化促进组织-ERTICO、日本道路交通车辆智能化推进协会-VERTIS)。
人们建设ITS 的初衷是希望通过在交通控制系统中融入更多的信息技术,以解决交通的资源利用率和安全性的问题。不过如今,它还被赋予了其他功能:增加旅途的舒适性、辅助或自动驾驶、运输效能提升(包括提高能源利用率、提供最短路径)、增值服务等。
智能交通是一门交叉学科,它涉及各种交通要素,包括道路、车辆、驾驶者和乘客、收费站和车站、信息技术、行人、法规等;包含各类交通管理系统和服务,如交通信息服务、车辆管理、电子收费、紧急救援、诱导信息服务等。
智能交通的应用主要包括车辆行驶安全、电子收费、公路及车辆管理、导航定位、商业车队管理等领域。
智能交通的构建是信息技术领域和交通运输领域的深度融合。通信网络、计算机技术、传感技术、软件工业是实现ITS 的关键。
世界道路协会的《智能交通系统手册》对ITS 定义:在交通运输领域集成应用“自动数据感知与采集”“网络通信”“信息处理”与“智能控制”,使得交通运输业变得更加安全、高效、环保和舒适的各种信信息系统的统称。
从ITS 定义中能够看到,智能交通系统发展的本质就是“信息技术”与“交通技术”的组合进化。
3 ITS 的发展历程
3.1 70 年代起步
1970 年, 美国提出了电子道路导航系统(Electronic Route-Guidance System,ERGS),通过路边设备提供车辆导航服务。
1973 年,日本的汽车交通控制综合系统(Comprehensive Automobile Traffic Control System,CACS)项目上线,这是日本第一个ITS 项目。通过路边设备引导车辆行驶,减少拥堵,避免安全事故发生,同时还可提供应急服务。
3.2 80 年代三强局势在1986 年欧盟启动了“最高效及安全欧洲交通项目(Program for European Traffic with Highest Efficiency and Unprecedented Safety,PROMETHEUS)”。意在研究车- 车通信(PRO-NET)、车- 路通信(PRO-ROAD)、辅助驾驶(PRO-CAR)等先进的交通信息技术。此外,欧盟同期开始研究的还有“保障车辆安全的欧洲道路基础设施计划(DRIVE)”。
2000 年欧盟发布的KAREN 项目包含了 ITS 体系框架。
2009 年,开始委托多家机构制定统一的ITS 标准。
2011 年,欧盟启动了Drive C2X 车联网项目,意在打造一个安全、高效、环保的行车环境,该项目于2014 年宣布试验成功。
1992 年,美国制订了智能车辆道路系统(IVHS)的研究计划,并在1995 年由运输部正式公布了“国家 ITS 项目规划”。
2009 年,美国交通部发布了《智能交通系统战略研究计划:2010-2014》,明确了车联网的构想。
2014 年美国计划强制推广车际通信(美国国家高速公路安全管理局发布《法规制定预告通知》《V2V 技术应用已准备就绪》),并在 2015 年由美国交通运输部启动互联汽车项目。
在前期研究成果的基础上(车间通信系统 -RACS、交通信息通信系统-TICS),1995 年日本道路交通情报中心建成了道路交通情报通信系统(VICS,Vehicle Information and
Communication System Center)。司机可以通过装载VICS 系统的车载导航器享受无偿交通信息服务。
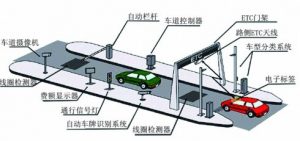
2000年开始,ETC电子收费系统(Electronic Toll Collection)在日本大力发展。
2002 年,VICS 中心开始向手机、掌上电脑、个人电脑等终端提供交通信息。
2003 年, 高级公路辅助导航系统(Advanced Cruise-assist Highway Systems,AHS)的项目正式开始实施,该系统通过路 - 车的通信协同(采用DSRC,专用短程通信),为驾驶人员提供安全行车服务。
4 车联网 / 车载网的发展
车联网/ 车载网是ITS 的重要组成部分。在智能交通中,相对于其他领域的研究(例如城市公共交通管理、交通诱导与服务等),对车联网/ 车载网的研究起步最晚,有些领域还处于最初级的阶段。
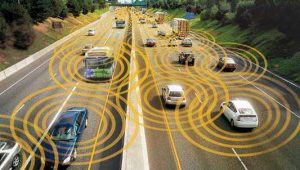
在全球范围内,最主要的车联网通信技术标准有两种,即 DSRC(IEEE)和LTE-V(3GPP),支持车辆连接到的所有相关事物,包括道路设施、其他车辆、人等。
4.1 DSRC
在智能交通的发展中,专用短程通信(DeDICated Short Range CommunICation,DSRC)技术是ITS 的基础之一,随着智能交通的发展而不断发展,相关技术在 90 年代取得了突破性进展。
1992 年,ASTM 美国材料试验学会(American Society for Testing Materials,ASTM)主要针对ETC 业务的开发而最先提出DSRC 技术的概念,该通信技术采用915 MHz 频段开展标准化工作。
1999 年10 月,美国联邦通信委员会在5.9 GHz 频段中为V2V 和 V2I 两种类型的短距离连接(Dedicated Short-Range Communication,DSRC)划分了专用频道。
2001 年,ASTM 的相关标准委员会选定IEEE802.11a 作为DSRC 底层无线通信协议。
在 2004 年,IEEE 修订了 IEEE802.11p 协议规范,并成立工作组启动了车辆无线接(Wireless Access in the Vehicles Environment,WAVE)的标准制定工作,为进一步开展车路协同的技术研究,启动VII/IntelliDrive 项目。同年的美国费城,国际计算机组织(Association Computing Machinery,ACM)第一届VANET 学术会议召开,“VANET”这个缩写单词首次被正式使用。
2010 年,WAVE 工作组正式发布了IEEE 802.11p 车联网通信标准。该标准作为车载电子无线通信规范,应用于智能交通(ITS)系统,成为了 DSRC 标准下的底层协议(MAC 层 /PHY 层,即OSI 模型中的数据链路层和物理层)。欧洲早在1994 年就由CEN(欧洲标准委员会)开始了 DSRC 标准的起草。1995 年,欧洲 DSRC 标准草案完成,并于1997 年通过(ENV12253“5.8GHz-DSRC- 物理层”和ENV12795“DSRC- 数据链路层”)。
2001 年 6 家欧洲汽车厂商(宝马、大众、戴姆勒 - 克莱斯勒等)联合供应商、研究机构成立了“车辆间通信联盟(Car 2 Car Communication Consortium,C2C-CC)”,联盟旨在利用无线 LAN 技术开发车间通信功能,并制定欧洲的车辆与基础设备之间的通信标准。
为解决车间通信问题,2004 年宝马和大众加入了FleetNet 项目(2000 年)的后续工程——NOW(Network on Wheels),主要针对车间通信和保证数据安全性进行研究。
在 2008 年,欧洲电信标准协会 ETSI 在5.9 GHz 频段为车载网划分了专用频道。在欧盟的第六框架计划中诸多智能交通项目(同时也是“eSafety 项目”)都在推动车联网/ 车载网相关技术的发展,如 COOPERS(智能交通安全协助系统-Austria tech 公司),CVIS(车路协同系统- 欧洲智能交通协会),SAFESPOT(SAFESPOT 项目- 菲亚特研究中心)等。
1994 年日本联合多家企业进行了ETC 收费系统的野外试验,并对DSRC 频率进行选频。1997 年,日本TC204 委员会制定了日本的DSRC 标准。2001 年ETC 系统正式开始服务。
1999 年日本(23 家企业)启动了Smart Way(智能道路系统),主要是在交通场景中提供各种信息交换的基础设施,各类设施的通信方式主要采用DSRC。(注释:日本的VICS,ETC,AHS 目前都属于Smart Way 项目)2007 年,日本初步完成了Smart Way 项目部分路段的试验计划。
日本的 DSRC 由ISO/TC204 制定,并支持最终的IEEE 802.11p 版本(美国)。 4.2 LTE-V2006 年,多家通信和汽车领域企业(爱立信、沃达丰、MAN Trucks、大众)携手推进智能汽车协作通信项目(Cocar,CoperativeCars),志在研究利用蜂窝通信技术(采用3G 网络)实现行车预警信息的相互传递(车辆之间、车与道路管理系统之间)。
随后,宝马和福特公司加入了CoCarX 项目,在LTE 网络覆盖下,车间的协作通信取得了较好的性能测试结果。
2012 年,欧盟资助LTEBE-IT 项目,开展LTE 演进协议在ITS 中的应用研究。
2015 年,3GPP 国际组织分别设立了专题“LTE 对V2X服务支持的研究”和“基于LTE 网络技术的V2X 可行性服务研究”,正式启动LTE V2X 技术标准化的研究。行业内,将“LTE-V2X”(LTE :Long Term Evolution,即4G 通信技术;V2X :Vehicle to Everything)简写为“LTE-V”,它是基于无线蜂窝通信的车联网技术,在业内也称为“C-V2X(Cellular- Vehicle to Everything)”。国内多家通信企业(华为、大唐、中兴等)参与了LTE-V 的研发。
2016 年9 月3GPP 完成了“基于 LTE PC5 接口的 V2V”标准制定,其标准规范引入了LTE-D2D 的 SideLink 链路技术,实现了高速度、高密度行车场景下的车与车直接通信。这种允许车间直连通信的方式,和以往的蜂窝通信技术有较大差异,也称为“分布式(LTE-V-Direct)”工作方式。与“分布式(LTE-V-Direct)”相对的传统蜂窝通信工作方式是“集中式(LTE-V-Cell)”,以基站为信息转发节点进行通信
2017 年3 月,3GPP 在“基于LTE 的V2X 业务”项目中,完成了车联网中各类型通信(车与车的蜂窝网通信、车与道路设施通信、车与人通信等)的标准化制定。
在 3GPP 的5G 通信标准中,LTE-V 将逐步演进为NR-V2X。
4.3 车联网和智能交通
从DSRC 和 LTE-V 的发展历史来看,DSRC 起步较早,并且已经在许多ITS 的研究项目中崭露头角,实现了一部分相对成熟的车联网应用,例如日本 Smart Way 中的各类子项目,欧洲的 COOPERS,CVIS,SAFESPOT,PreVENT 等项目、美国的ETC 应用、VII/IntelliDrive 等项目。
在 LTE-V 标准之前,车辆使用3/4G 的蜂窝无线技术连 接 到 网 络, 称 之 为 Telematics(Telecommunications 和Informatica 的合成词,意为远距离通信技术和信息技术结合的网络)。
Telematics 是车联网的一种常见形式,但由于只实现了车与云端的联接,所以也被理解为“狭义车联网”。LTE-V 的出现,是试图打破原本蜂窝接入网络只能作为DSRC 技术补充的境地,将短距、直连、非 IP 化的通信技术(PC5 接口)和蜂窝通信技术进行融合,从而在车联网领域形成一套完整的通信技术体系。

5 结 语
从各国对车联网的研究模式来看,由于ITS 应用场景复杂、需求多样、终端种类繁多,所以车联网的研究需要和ITS 应用的开发同步推进,以满足行车过程中对各类技术细节的要求。
为了实现更高层次的安全、高效、环保等生产(行车)目标,车辆(以及交通配套设备和系统)需要具备更多更强的感知能力、通信能力、计算能力(智能),通过增加交通系统整体的
信息化能力以实现整个交通领域的升级。即车联网技术是和传感、计算(例如自动驾驶)、软件开发等信息化技术同步发展的,未来的“智能交通”是交通(道路)网络和信息网络的深度交融。转自:《物联网技术》杂志社。

